









Partner Equo
- Manipulators with Rigid Arms








Features
- Max weight capacity: 500
- Max working radius: 4000 mm
- Vertical lift: 2450 mm
- Working pressure: 0.7 ÷ 0.8 Mpa
- Control system: solely pneumatic
- Supply: filtrated compressed-air (40 µm), not lubricated
- Noise level: <70 dB
- Max vertical lifting speed: 0,5 meters/second
- Working temperature: from +0° to +45° C
- Consumption: from 50 Nl ÷ 200 Nl per working cycle
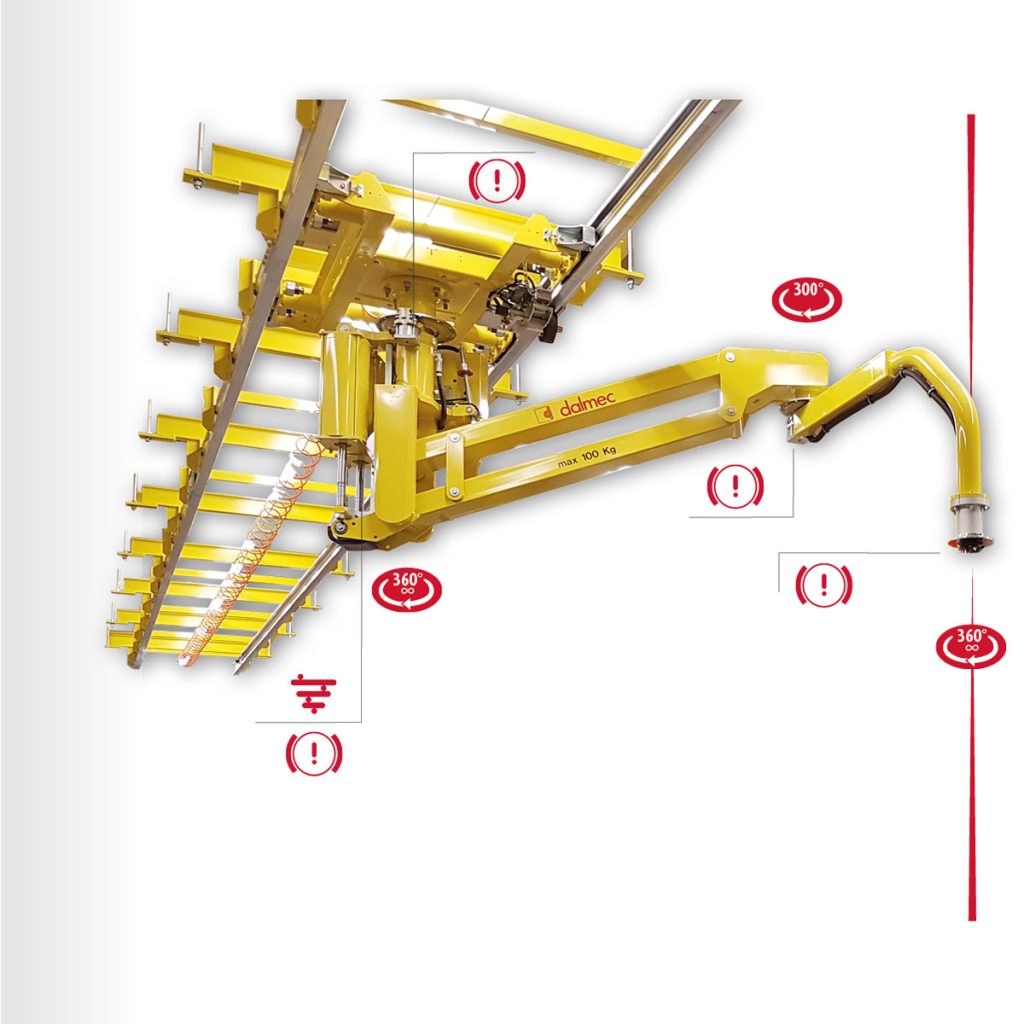
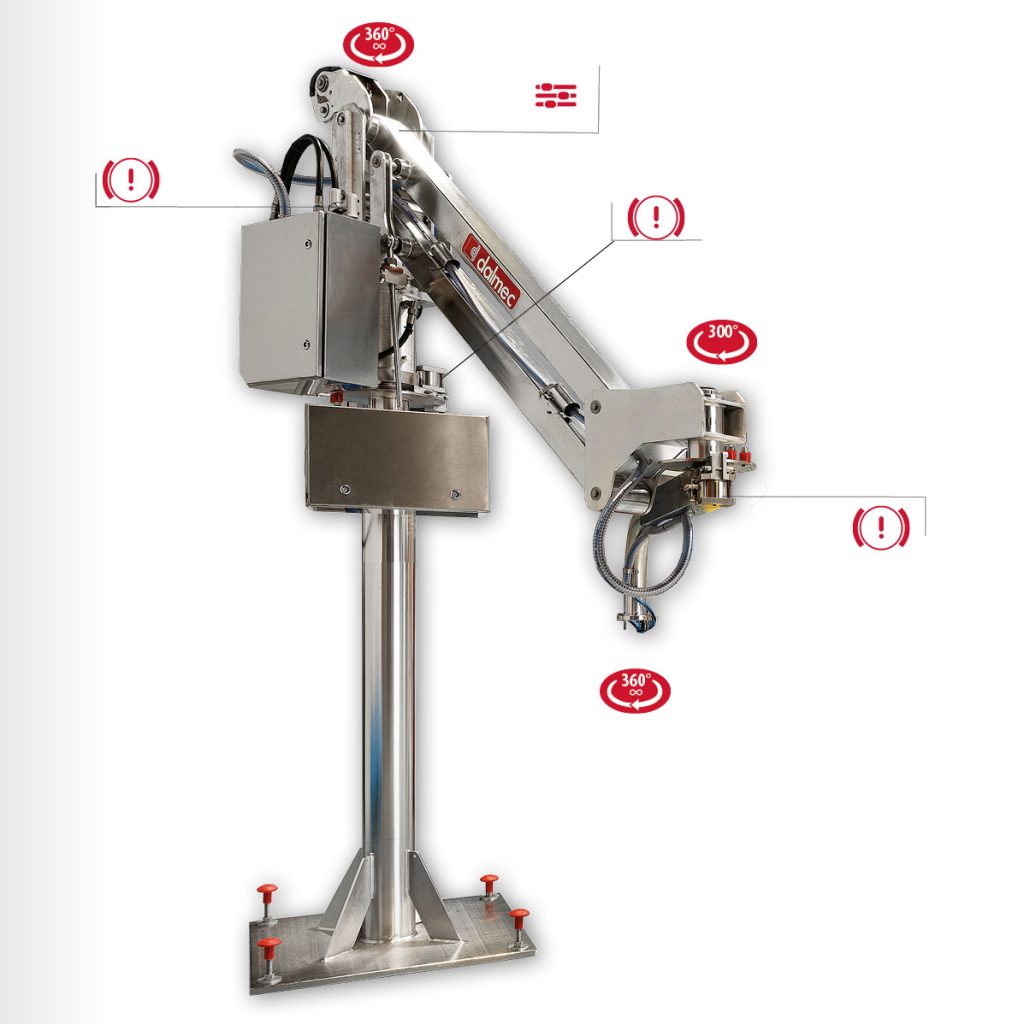
- Rotations: – constant 360° on the column and tooling axis – 300° on the intermediate axis
Execution
- Atex Column
- Atex Fixed Overhead
- Atex Overhead Running
- Column
- Fixed Overhead
- Inox Column
- Inox Fixed Overhead
- Inox Overhead Running
- Overhead Running
INDUSTRIAL MANIPULATOR PARTNER EQUO WITH ARTICULATED ARMS
Pneumatic Manipulator PARTNER EQUO with articulated arms, equipped with special gripping tools, is suitable to handle manufactured products having an off-set centre of mass compared to the vertical axis of the Manipulator arm. Its modular structure has been designed to resist the torsions resulted from this stress. In addition, having the possibility to change the terminal arm shape and dimensions to suit, the manipulator Partner PE can be used in particularly narrow environments.
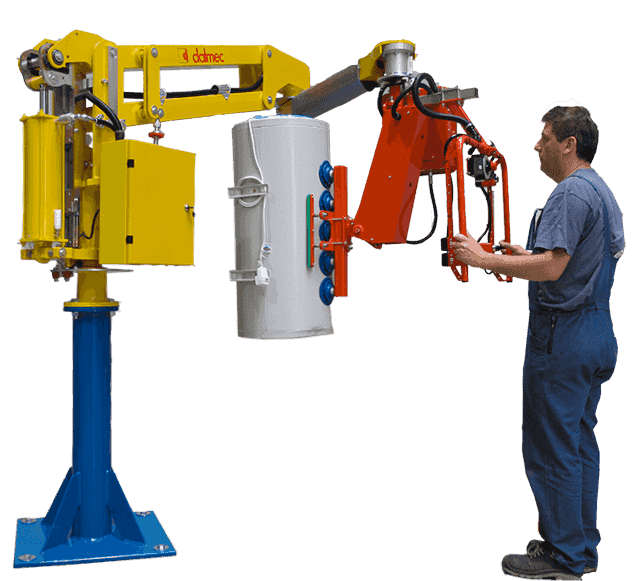
OPERATION
A pneumatic cylinder fed with compressed-air, combined with a transmission lever system, provides balance to the load weight applied.
The force of the cylinder is controlled by two specially arranged pneumatic circuits: the first keeps the weight of the gripping system always balanced; the second keeps the weight of the load always balanced.
The operator can change the load level applying a minimum force on the gripping tool or directly on the load.







| Fixed plate for floor anchoring | Autostable base-plate for forklift truck | Autostable base-plate for pallet truck |
 |  |  |
| Manual autostable base-plate | Trolley mounted base-plate | Floor built-in track |
 |  |  |

Anchor flange
The pneumatic manipulator fixed overhead version allows to eliminate any floor obstructions.
The flange of the Manipulator is supplied with holes for the anchoring with screws to a strong plate to the ceiling or to a shelf.
All movements are free and are obtained with minimum effort by the direct action of the operator on the gripping tooling or on the load.

Anchor
The Manipulator is supplied with an overhead trolley to run in a tracking system.
Tracking system
The tracking system is composed of two opposite aluminium U sections with connecting and stiffening ribs,complete with attachment points for an overhead suspension and end buffers. The junction between the various parts is done with screws.
Attachment
The attachment of the tracking system to the supporting structure is carried out by means of rods and suspension brackets