









Posifil
- Manipulateurs à Câble










Fonctionnalités
- Force max. : 140 kg
- Rayon d’action max: 3000 mm
- Course verticale: 1800 mm
- Pression d’utilisation: 0.7 ÷ 0.8 Mpa
- Système de commande: seul pneumatique
- Alimentation: Air comprimé filtré (40 µm), non lubrifié
- Niveau sonore: <70 dB
- Vitesse max de levage: 0,5 m/seconde
- Température d’utilisation: de +0° à +45° C
- Consommation: de 50 Nl ÷ 200 Nl par cycle de travail
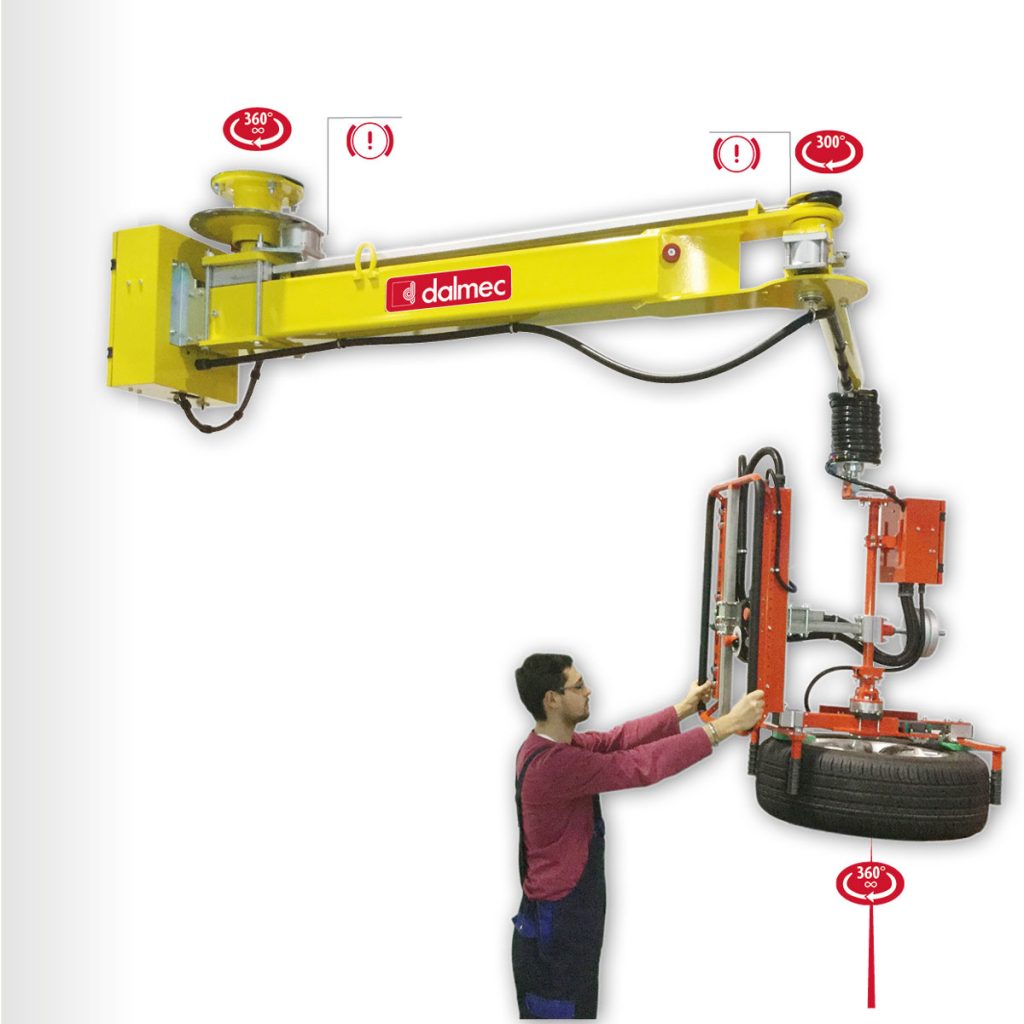
- Rotations:– à 360° à l’infini autour de l’axe de la colonne et de l’outil de préhension – à 315° de l’axe intermédiaire
EXÉCUTION
- Aérien fixe
- Aérien mobile
- Atex aérien fixe
- Atex aérien mobile
- Atex colonne
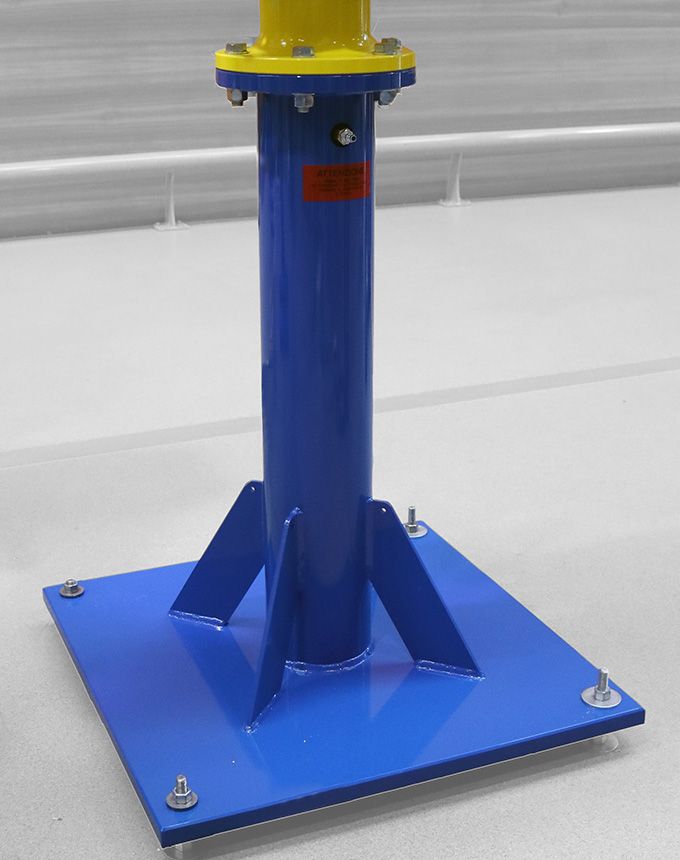
- Colonne
- Inox aérien fixe
- Inox aérien mobile
- Inox colonne
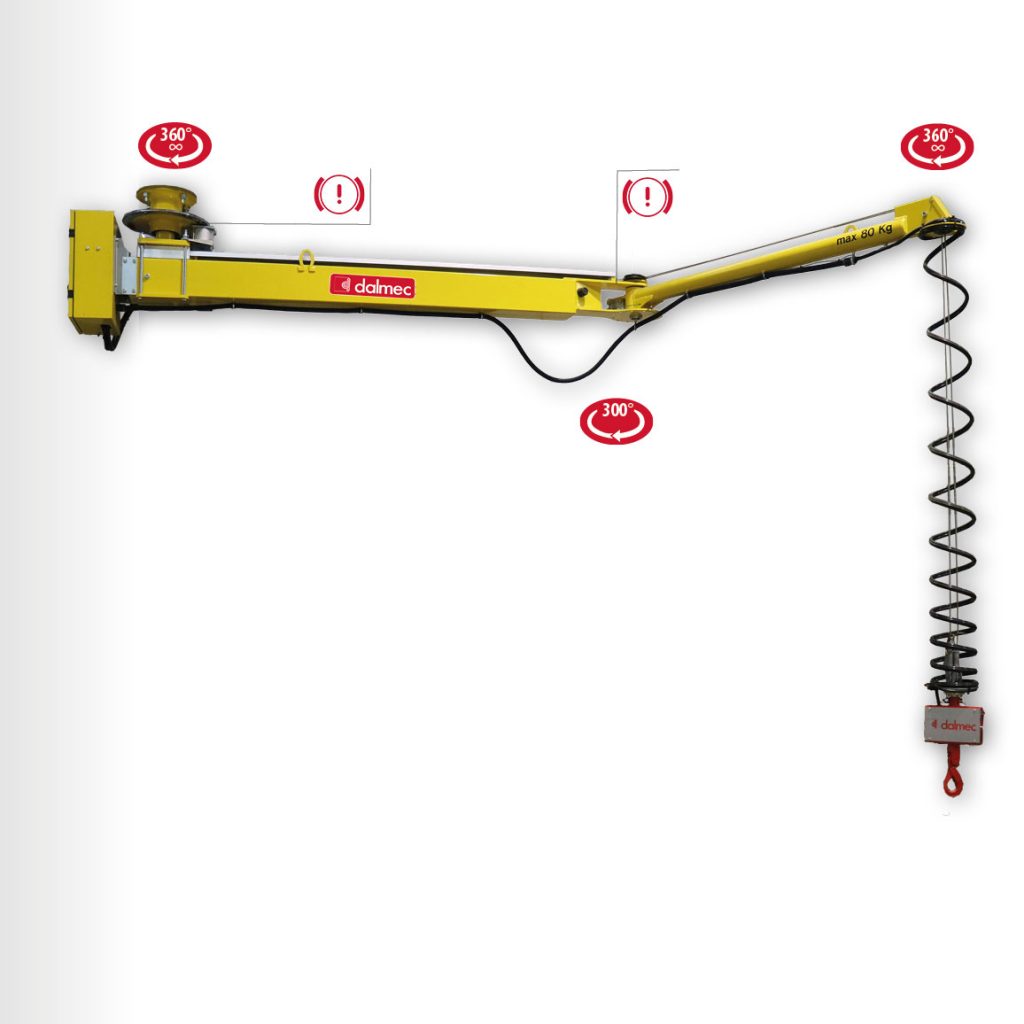
MANIPULATEUR À CÂBLE POSIFIL PF – ANNULATEUR DE POIDS
Le manipulateur pneumatique à double câble POSIFIL PF, est particulièrement adapté pour la manipulation manuelle, en absence d’effort, de tout type de charges dans toutes les directions. Il permet ainsi à l’opérateur de travailler sans fatigue, avec rapidité et précision, dans des conditions optimales d’ergonomie et de sécurité. La structure du POSIFIL PF à double bras articulé assure une grande maniabilité des mouvements sur la totalité de la zone de travail. Les outils de préhension sur mesure associés au POSIFIL PF sont reliés au manipulateur par deux câbles indépendants en acier pour garantir un maximum de sécurité à l’opérateur.
PRINCIPE DE FONCTIONNEMENT
Un vérin pneumatique alimenté à air-comprimé, couplé à un système de transmissions à double câble, assure l’équilibrage de la charge appliquée. Le vérin amplifie l’action de montée et de descente qui est appliquée manuellement par l’opérateur sur l’outil de préhension ou directement sur la charge. Le vérin est alimenté par deux circuits préréglés : le premier équilibre en permanence l’outil de préhension, le second équilibre les différents poids de la charge.




| Base standard fixée au sol | Base auto-stable pour chariot élévateur | Base auto-stable pour transpalette |
 |  |  |
| Base auto-stable manuellement | Chariot motorisé pour rails au sol | Chemin de roulement encastré dans le sol |
 |  |  |

Platine d’ancrage
Le manipulateur pneumatique en version “aérien fixe” permet d’éviter tout encombrement au sol.
La platine du manipulateur est fixée à la structure du bâtiment ou sur une console.
Tous les mouvements dans l’espace sont libres et sont obtenus avec un minimum d’effort par l’action directe de l’opérateur sur l’outil de préhension ou sur la charge.

Fixation
Le Manipulateur est équipé de chariot adapté au roulement dans le rail.
Chemin de roulement
Le chemin de roulement est constitué par deux rails en profilés U en aluminium opposés, reliés par entretoises de renfort. Les pattes d’accrochage à la structure existante et les butées fin de course complètent la fourniture.
Fixation à la structure de support
La fixation du chemin de roulement à la structure de support est réalisé par l’intermédiaire de tirants et pattes d’accrochage.